De verscheidenheid aan vormen van robotisering maakt duidelijk dat de vraag naar ‘het effect van robotisering’ niet eenduidig te beantwoorden is. Op deze (toenemende) verscheidenheid willen we in dit project enige grip krijgen. De vraag is wat een handig indelings- of differentiatieprincipe is dat ons de juiste kapstok biedt om de specifieke vragen over de effecten, kansen en bedreigingen van robotisering te beantwoorden. In de literatuur en op internet worden verschillende indelingen van robotvormen gepresenteerd. Figuur 3.1 toont twee voorbeelden.
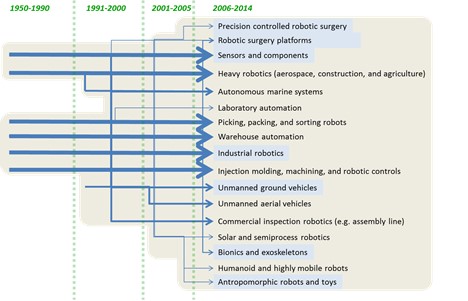
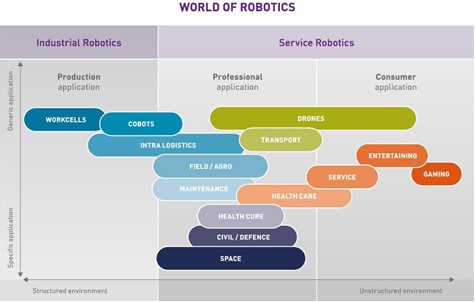
Figuur 3.1 Bestaande indelingen in robotvormen
Boven: Indeling gehanteerd door de Boston Consulting Group 2014, waarin vooral de ontwikkeling in de tijd van vormen van robotica is weergegeven. Deze indeling is niet gebaseerd op de wijze waarop de mens door de robot wordt ondersteund en sluit daarom niet goed aan bij de vraagstellingen van dit project.1
Onder: Indeling in industriële robots versus service robots, beschreven in een rapport van de Brabantse Ontwikkelingsmaatschappij (2014). De meeste ontwikkeling zit in de service-robots: de robots die niet autonoom opereren, maar in samenwerking met de mens. Dit zijn de voor dit project interessante robotvormen, maar tegelijkertijd ontbreekt in deze indeling de wijze van robotondersteuning.
Deze verschillende indelingen van robotvormen zijn over het algemeen opgesteld vanuit het perspectief van de technologie en/of het applicatiegebied en niet vanuit het perspectief van de gebruiker (‘wat bekent de robotvorm in termen van werkeisen?’). In dit AKC-onderzoek staat het perspectief van de gebruiker centraal. Met andere woorden: wat betekent de robotisering voor de medewerker? Twee dimensies zijn daarbij relevant, namelijk de mate waarin taken worden overgenomen door een robotvorm en de aard van die overgenomen taken (zie figuur 3.2).
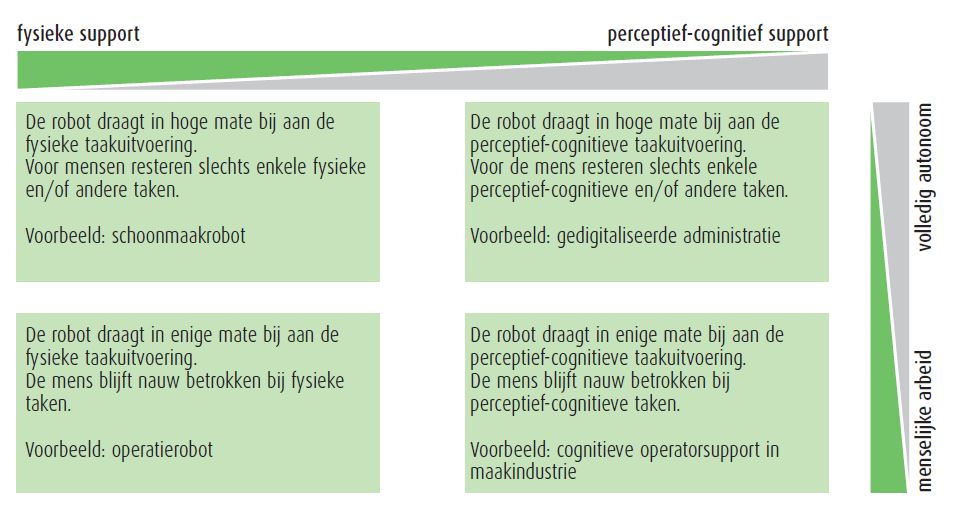
Figuur 3.2 Indeling van vormen van robotisering. In deze figuur staat de aard van robotondersteuning op de horizontale as: een robot kan de fysieke taakuitvoering uit handen nemen, oftewel ‘fysieke support’ geven. Een robot kan ook gaan waarnemen, denken en beslissen, oftewel ‘perceptief-cognitief support’ geven. Beide vormen van support komen vaak gelijktijdig voor! In dezelfde figuur staat de mate van robotisering, oftewel de robotiseringsgraad op de verticale as. Op beide dimensies, verticaal en horizontaal, is sprake van een glijdende schaal. Elke robotvorm kunnen we ergens in dit schema plaatsen. Ter illustratie is in deze figuur ook de omschrijving van vier soorten robots met een voorbeeld opgenomen.
Meer uitleg is te vinden op: https://www.bcgperspectives.com/content/interactive/business_unit_strategy_growth_evolution_of_robotics/